你每天早上过马路,需要同期算廓清对面那辆车的车速、距离和你走完斑马线所需的 3.5 秒吗?
虽然不需要。你只会快速看一眼,心里默然判断一个关节问题:「车会不会撞到我?」然后决定是走照旧停。
扫数这个词经过不到一秒,消费的能量蝇头微利。但今天的机器东谈主,真的齐在作念前一种事。
可提现游戏平台中国官网它们被设定为按固定频率来瞻望宇宙的下一秒,每秒 30 次、50 次,哪怕明知谈接下来的 0.5 秒什么齐没发生,它也必须算完。
这就像你每天早上外出前,齐要完竣计较一遍过马路的 300 个圭表才敢迈出第一步。
累不累?虽然累。
关节是,大部分计较齐是猝然的。
这等于现时机器东谈主「时灵时不灵」的根蒂原因之一:
它们太听话了,听话到对每一帧、每一秒齐平均使劲,从不问我方「什么事值得想,什么事无须想」。
5 月 29 日,自变量机器东谈主推出首个具备「事件级瞻望才调」的宇宙模子:Wall-WM。
它的中枢等于跳出「定期间均匀采样」的旧范式,模子不再机械地瞻望每一帧,而是判断哪些倏地信得过蹙迫。
换句话说,Wall-WM 让机器东谈主终于学会了「持要点」。
然而,这个宇宙模子的推出,到底意味着什么?
为什么「持要点」这种东谈主类与生俱来的才调,放到机器东谈主身上就成了底层期间立异?要汇报这些问题,得先从机器东谈主「大脑」的职责格式提及。
1、从机械师法到信得过默契,Wall-WM 是如何作念到的?
目下行业主流的机器东谈主「大脑」叫 VLA(视觉-言语-作为)。听名字就知谈,一个矜重「看」,一个矜重「听懂东谈主话」,一个矜重「出手」。
听起来挺合理,但问题在于,这三个模块是串联的:视觉模块把看到的东西传给言语模块,言语模块默契后再传给作为模块。每传一次,信息就打一次扣头。
这等于为什么许多机器东谈主看起来很「笨」。不是因为它没看到,而是因为它看到的信息在传到「出手」模块时,依然丢失了一泰半。那有莫得什么办法不错改良?
自变量机器东谈主给出的谜底是,通过 Wall-WM 这一生界模子,先换掉它想考的时候单元。
传统模子按固定频率瞻望异日,每秒 30 次、50 次,每一帧齐使劲。哪怕接下来的 0.5 秒什么齐没发生,它也必须算完,这叫「帧级瞻望」。
但自变量机器东谈主换了一套逻辑:以「事件」为单元来瞻望。
什么是事件?伸手、持取、拿起、挪动、扬弃,这些在一段时候内连贯、有明确道理的作为片断,等于事件。
模子只谢宇宙发生「蹙迫变化」时才再行颐养瞻望。
比如「杯子开动滑落」是一个事件,「手遭遇了杯子」是另一个事件。其他时候,它不需要每秒想考 30 次。
更蹙迫的是,它学到的不是「第 10-20 帧我要扩充提醒 X」,而是在此事件下,物理宇宙将如何演化、我应当如何扩充。
但这里有一个荫藏的艰苦:
淌若让机器东谈主在学新作为的同期,把蓝本好收敛易学会的视觉才调给忘掉了,怎么办?Wall-WM 在规划上专门探究了这个「学新不忘旧」的问题。
Wall-WM 的规划很奥秘。它的视觉模块和作为模块不是平起平坐的,而是单向耦合:
作为模块只可读取视觉模块的信息,但弗成反向打扰它。就像你看书的时候不错记札记,但记札记不会把书上的字改掉。
这么一来,在大限制检会时,模子既能保留原有的视觉默契才调,又能让作为才调不绝增长。工程师也不需要提前「猜」作为该怎么编码,因为模子我方会学出来。
但贬责了「学新不忘旧」,Wall-WM 还要贬责另一个老问题:机器东谈主身上有好几个录像头,它怎么知谈它们拍到的其实是团结个东西?
大大批机器东谈主身上不啻一个录像头,比如头顶一个、左手腕一个、右手腕一个。问题是,它怎么知谈这三个录像头拍到的画面是对应团结个物体的?
传统作念法是让模子我方去学对应联系。
但后果不时不好:模子会偷懒,把跨视角慎重力当成一个通用特征搀杂器,而不是信得往常默契空间几何。
因此,Wall-WM 引入了两个机制:
视锥掩码和管状掩码。
视锥掩码从物理层面告诉模子:这两个录像头的画面在空间上根蒂不可能对应,别汉典去学它们的联系。
管状掩码则反过来「免强」模子去学那些信得过应该对应的区域,它会独特覆盖一个录像头里的某块区域,逼模子从其他录像头找到疏导的内容。
一个平日的默契:普通 AI 看东西是「二维拼图」,每一张画面齐是零丁的平面。
而 Wall-WM 看东西是「三维积木」,百家乐2026世界杯中国官方下载它知谈不同角度的画面拼起来是一个立体的物体。哪怕某个角度被覆盖了,它也能「脑补」出物体的着实位置。
看懂空间、默契事件,Wall-WM 在「想什么」上依然比传统模子前进了一大步。但机器东谈主光会想还不够,它还得想得快,毕竟着实宇宙不等东谈主。
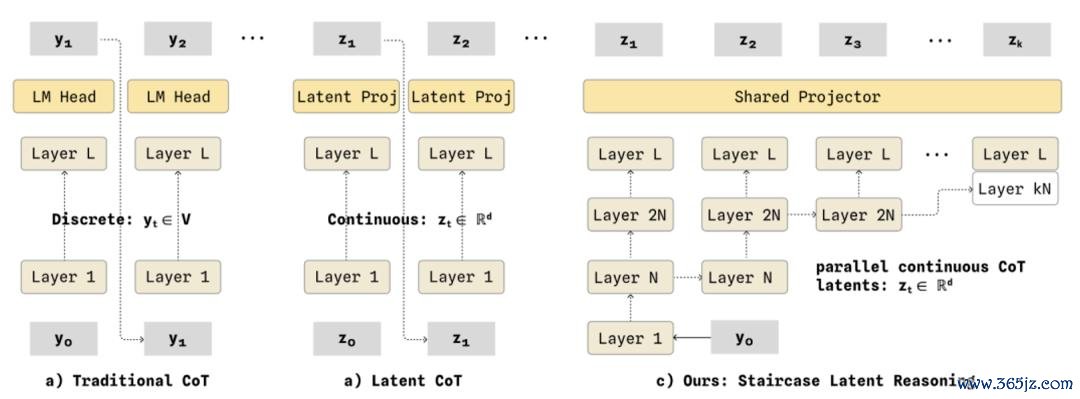
机器东谈主在作念复杂任务时,不时需要「想维链」(CoT),也等于在脑子里先推理一遍再活动。
但传统 CoT 是一步一步推理的,想完第一步,才能想第二步,特别慢。
Wall-WM 的作念法是:
底层只跑一次,高层像道路通常并行张开。况兼最关节的是,它产出的 CoT 仍然是冲破可读的文本,你随时不错开放看模子是怎么推理的,可讲明注解性和及时性第一次无须二选一。
2、Wall-WM 的发布,对行业和开拓者来说意味着什么?
从默契事件到看懂空间,再到快速决策,Wall-WM 在底层依然把「机械式」的想考格式改写了一遍。
不外,Wall-WM 还有一个讨巧的规划:团结套「大脑」,不错活泼适配不同场景。
它有两种模式。一种叫「事件模式」,合适依然有表层策动器的场景,比如你给机器东谈主一个「把杯子拿过来」的任务,它我方就能拆成伸手、持取、拿起、挪动、扬弃等一串事件,一次输出一个完竣的作为单元,特别贴合事件规模。
另一种叫「协调模式」,合适莫得外部策动器、需要端到端及时为止的场景。模子我方边推理边扩充,保持固定的为止频率。
这两种模式不错按需切换,无须再行检会。
轻量级的家庭小机器东谈主不错跑在低算力模式,工业机械臂不错切换到大算力模式。团结套代码想路,小到扫地机器东谈主,大到工场产线,齐能适配。
关于开拓者来说,再也无须为不同缔造爱戴多套模子,开拓老本也在大幅裁减。
目下,具身智能行业有一个共鸣正在变成:
宇宙模子,将成为机器东谈主领域的下一个基础设施,但大大批齐还停留在论文或者里面系统阶段。
而自变量机器东谈主是把「事件级瞻望才调」的宇宙模子完竣展示出来的。
它不是放出一个 demo 或者一个 API,而是通逾期间敷陈详备公开了整套想路、模子规划、检会决议和实际数据。
而实际收尾,也考据了「事件级瞻望」这条路线的灵验性。
在真机 Core15 L1 基准测试中,Wall-WM 的平均任务完因素数较着进步 π0.5 与 DreamZero 等同类模子。
在基础任务、推理任务、贤达操作以及泛化场景下,均展现出了更强的完成才调,亦然目下空洞提醒设定下完成度最高的 L1 模子之一。
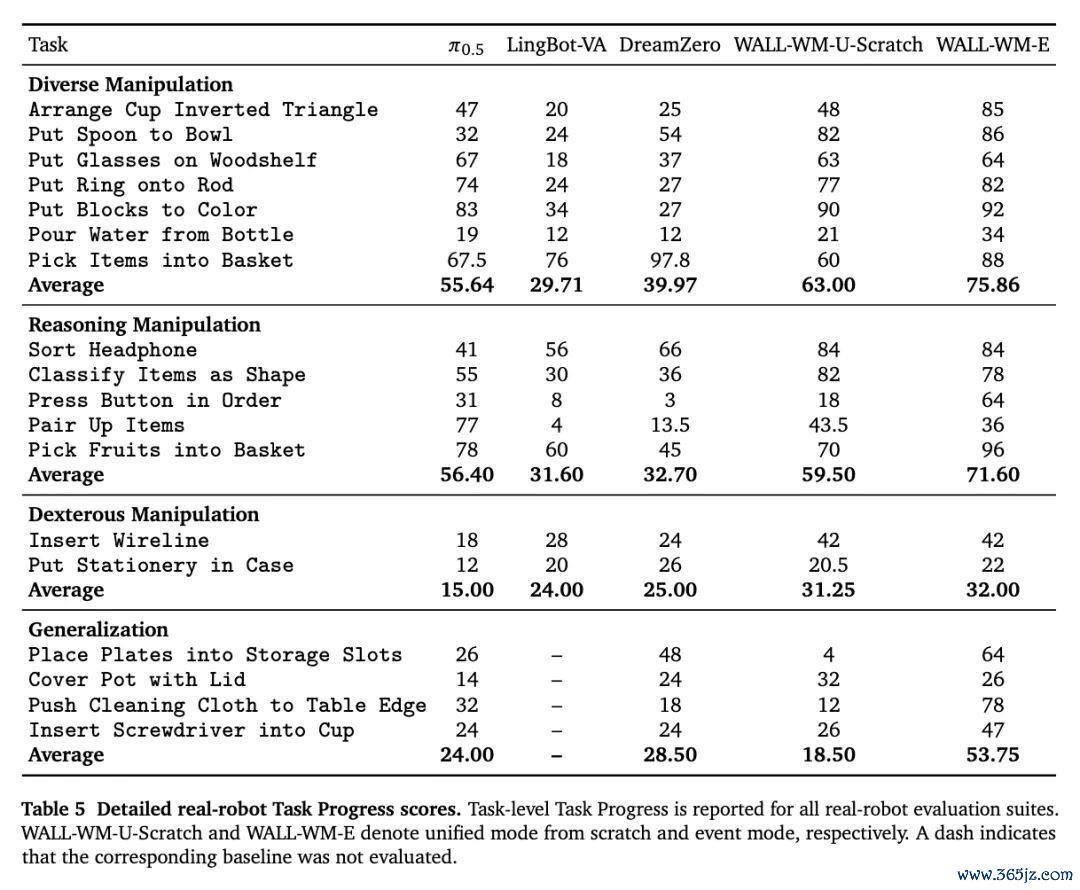
这意味着,Wall-WM 普及的依然不仅仅机械扩充才调,而是机器东谈主关于复杂任务与空洞标的的默契才调。
与此同期,在具身视频生成(Embodied Video Generation)测试中,比较 Wan2.1、Wan2.2 等传统视频生成模子,Wall-WM 在 Motion Quality(作为质料)、Semantic Consistency(语义一致性)以及 Physical Plausibility(物理合感性)等多个具身谋划维度上,均杀青了较着进步。

这背后,本色上等于因为它不再仅仅逐帧生成画面,而是在瞻望「事件」如安在着什物理宇宙中演化。
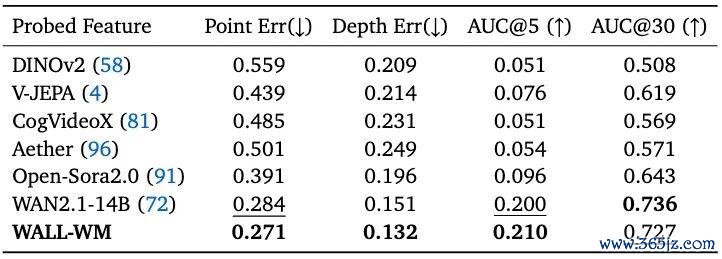
此外,在 3D Awareness(CO3Dv2)测试中,Wall-WM 在 Point Error 与 Depth Error 两项空间差错看法上,也优于 WAN2.1-14B、Open-Sora 2.0、V-JEPA、DINOv2 等模子。
但比较性能普及,更蹙迫的是,它转换了机器东谈主默契宇宙的格式。
往常的机器东谈主,对每一帧齐在使劲;而当今,它开动学会像东谈主通常,知谈什么值得想考,什么不值得花消算力。
而 Wall-WM 信得过的价值,简略并不在于它是又一个跑分更高的 VLA 模子,而在于它把如安在保留多模态视觉先验与空间几何默契的同期,让模子信得过学会瞻望物理宇宙这个具身基础模子的根蒂问题,给出了一套自洽的工程化谜底。
在这里,「事件」不再仅仅一个作为标注粒度手机百家家乐app下载,而开动成为宇宙模子信得过的想考单元。